По заданной пространственно-временной траектории.
Задачи аэронавигации
- координат (географических-->широта, долгота; полярных--> азимут , дальность)
- высота (абсолютная, относительная, истинная)
- высота над поверхностью Земли (истинная высота полета)
- курс
- путевой угол (условный, истинный, магнитный, ортодромический)
- приборная, истинная, путевая скорость
- скорость , направление(метеорологическое, навигационное) и угол ветра
- линия заданного пути (ЛЗП)
- линейно бокового уклонения (ЛБУ)
- дополнительная поправка (ДП) (при полете на радиостанцию)
- боковое уклонение (БУ) (при полете от радиостанции)
- обратный, прямой пеленг (ОП,ПП) (при полете на/от радиопеленгатор)
- Контроль и исправление пути: (С выходом на ЛЗП или в ППМ (поворотный пункт маршрута), в зависимости от ЛБУ и ШВТ)
- по дальности
- по направлению
- Прокладка и счисление пути:
- Прямая
- Обратная
- Штилевая
- Построение оптимальных маршрутов для достижения точки назначени
- выход на точку за минимальное время
- выход на точку с минимальными затратами топлива
- выход на точку в заданное время
- Оперативная коррекция маршрута во время полёта
- при изменении полётного задания, в том числе при неисправностях в летательном аппарате
- при возникновении неблагоприятных метеорологических явлений на маршруте
- во избежание столкновения с другим летательным аппаратом
- для сближения с другим летательным аппаратом
Определение навигационных элементов летательного аппарата
Для определения навигационных элементов применяются различные технические средства:
- Геотехнические
- позволяют определять абсолютную и относительную высоту полёта, курс летательного аппарата, его местонахождение и так далее).
- измерители воздушной и путевой скоростей,
- магнитные и гиромагнитные компасы, гирополукомпасы,
- оптические визиры ,
- инерциальные навигационные системы и так далее.
- Радиотехнические
- позволяют определить истинную высоту, путевую скорость, местонахождение летательного аппарата путем измерения различных параметров электромагнитного поля по радиосигналам .
- радионавигационные системы и так далее.
- Астрономические
- позволяют определять курс и местонахождение летательного аппарата
- астрономические компасы
- астроориентаторы и так далее
- Светотехнические
- обеспечивают посадку летательного аппарата в сложных метеорологических условиях и ночью и для облегчения ориентировки.
- светомаяки.
- Комплексные навигационные системы - автопилот - могут обеспечить автоматический полёт по всему маршруту и заход на посадку при отсутствии видимости земной поверхности.
Источники
- Черный М. А., Кораблин В. И. Самолётовождение , Транспорт, 1973, 368 с. битая ссылка
Wikimedia Foundation . 2010 .
- Космическая навигация
- Инерциальная навигация
Смотреть что такое "Воздушная навигация" в других словарях:
Воздушная навигация - комплекс действий экипажа, направленный на достижение наибольшей точности, надежности и безопасности вождения воздушного судна и групп воздушных судов по заданной траектории, а также в целях вывода их по месту и времени на заданные объекты (цели) … Официальная терминология
Навигация воздушная - Воздушная навигация, аэронавигация наука о методах и средствах вождения воздушного судна по программной траектории. Задачи аэронавигации Определение навигационных элементов летательного аппарата широта, долгота высота НУМ высота над поверхностью… … Википедия
НАВИГАЦИЯ - (лат. navigatio от navigo плыву на судне), 1) наука о способах выбора пути и методах вождения судов, летательных аппаратов (воздушная навигация, аэронавигация) и космических аппаратов (космическая навигация). Задачи навигации: нахождение… … Большой Энциклопедический словарь
навигация - и; ж. [лат. navigatio от navigo плыву на судне] 1. Судоходство, мореплавание. Из за обмеления реки н. невозможна. 2. Такое время в году, когда по местным климатическим условиям возможно судоходство. Открытие навигации. Суда в порту ждали начала… … Энциклопедический словарь
Навигация - В Викисловаре есть статья «навигация» Навигация (лат. navigatio, от лат. navigo плыву на судне): Мореплавание, судоходство Период времени в году, когда по местным климатическим условиям возможно су … Википедия
навигация Энциклопедия «Авиация»
навигация - Рис. 1. Определение местоположения ЛА по линиям положения. навигация летательных аппаратов, аэронавигация (от греч. aēr воздух и лат. navigatio мореплавание), наука о методах и средствах вождения летательных аппаратов из… … Энциклопедия «Авиация»
НАВИГАЦИЯ - (лат. navigatio, от navis корабль) 1) мореплавание. 2) наука об управлении кораблем. Словарь иностранных слов, вошедших в состав русского языка. Чудинов А.Н., 1910. НАВИГАЦИЯ 1) искусство управления кораблем в открыт. море; 2) время года, в… … Словарь иностранных слов русского языка
Навигация (морск.) - Навигация (лат. navigatio, от navigo ‒ плыву на судне), 1) мореплавание, судоходство. 2) Период времени в году, когда по местным климатическим условиям возможно судоходство. 3) Основной раздел судовождения, в котором разрабатываются теоретические … Большая советская энциклопедия
НАВИГАЦИЯ - НАВИГАЦИЯ, и, жен. 1. Наука о вождении судов и летательных аппаратов. Школа навигации. Воздушная н. Межпланетная (космическая) н. 2. Время, в течение к рого возможно судоходство, а также само судоходство. Начало, конец навигации. Н. открыта. |… … Толковый словарь Ожегова
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ВОЗДУШНОГО ТРАНСПОРТА
Учебно-тренировочный центр «ЧелАвиа»
ВОЗДУШНАЯ НАВИГАЦИЯ
Учебное пособие
Челябинск
PPL(A), Учебное пособие, Воздушная навигация, 2013 год, г. Челябинск,
«УТЦ «ЧелАвиа».
В данном учебном пособии рассматриваются основные вопросы теории и практики самолетовождения с использованием геотехнических и радиотехнических средств, основы авиационной картографии, навигационные элементы полета.
Большое внимание уделено подготовке, выполнению и обеспечению безопасности полетов по трассам, а также практическому использованию средств самолетовождения.
СОКРАЩЕНИЯ……………………...………………………….……….….…....4
ГЛАВА 1. Основы воздушной навигации………………………………....…....5
ГЛАВА 2. Авиационная картография……………………….…….…….….….29
ГЛАВА 3. Земной магнетизм и курсы ВС ……………………….…….……...53
ГЛАВА 4. Время. Счисление времени…………………………….……..…….64
ГЛАВА 5. Навигационная линейка НЛ-10м ……………………….….....……69
ГЛАВА 6. Высота и скорость полета ……………………………………..…...79
ГЛАВА 7. Влияние ветра на полет самолета ………………………….…...….90
ГЛАВА 8. Визуальная ориентировка ……………………………………....…105
ГЛАВА 9. Применение угломерных радионавигационных систем …….…..131
ГЛАВА 10. Заход на посадку по ОСП ……………………………………..…149
ГЛАВА 11. Общий обзор навигационного оборудования ВС первоначального обучения……………………………………………………………………..…..155
ГЛАВА 12. Особенности использования курсовых приборов и систем для навигации ……………………………………………………………….…..…..163
ГЛАВА 13. Особенности использования автоматического радиокомпаса для навигации ……………………………………………………………..…...……174
ГЛАВА 14. Особенности использования спутниковой навигационной системы
GNS 430 ………………………………………………………..………………..176
ГЛАВА 15. Обеспечение безопасности самолетовождения ….…….…...…..189
БИБЛИОГРАФИЧЕСКИЙ СПИСОК…………………………….……...…….209
СОКРАЩЕНИЯ |
|
Место самолета |
|
Заданный путевой угол |
|
Фактический путевой угол |
|
Угол сноса |
|
Воздушное судно |
|
Обслуживание воздушного движения |
|
Гражданская авиация |
|
Авиационное происшествие |
|
Руководство по летной эксплуатации |
|
Федеральные авиационные правила |
|
Российская Федерация |
|
Сложные метеоусловия |
|
Аэронавигационное обеспечение полетов |
ГЛАВА 1. ОСНОВЫ ВОЗДУШНОЙ НАВИГАЦИИ
1.1 Навигационная терминология и определения
Слово «аэронавигация» произошло от латинского «navigatio», что дословно издавна означало «мореплавание», причем в самом широком значении этого слова. Но довольно скоро оно приобрело и более узкий смысл: деятельность (и,
конечно, изучающая эту деятельность наука) по выполнению точного и безопасного плавания судов. Определение местоположения, курса и скорости судна, предотвращение попадания на мель или рифы, выбор наилучшего пути – эти и другие задачи морской навигации, которую сейчас чаще называют судовождением, понятны даже неспециалистам.
По мере того, как люди стали передвигаться и в других средах, появилась воздушная навигация (аэронавигация), а также навигация космическая, наземная и даже подземная. Основное содержание любой из них одно и то же – определение местоположения объекта и параметров его движения, управление его движением по желаемой траектории. Наравне с термином «аэронавигация» в
разное время использовались, да и продолжают порой использоваться, термины
«воздушная навигация» и «самолетовождение».
Термины «аэронавигация» и «воздушная навигация» полные синонимы,
поскольку греческое «aer» и означает воздух. Но использовать слово
«аэронавигация» явно предпочтительнее. Во-первых, короче, во-вторых,
полностью соответствует аналогичным иноязычным терминам (английское
«airnavigation», французское «navigation aerienne»), а в-третьих, появился этот термин исторически раньше. Термин «самолетовождение», под которым понимают не только вождение самолетов, но и вертолетов, и других летательных аппаратов, произошел, по-видимому, по аналогии со словом «судовождение».
Иногда используются слова «радионавигация», «астрономическая навигация», «инерциальная навигация» и тому подобное. Это не отдельные виды навигаций, а та же навигация (воздушная, морская, космическая), но осуществляемая с использованием технических средств определенного вида
(радиотехнических, астрономических и т.п.). Если говорить об аэронавигации как
науке или учебной дисциплине, то это ее разделы, рассматривающие вопросы применения определенных видов навигационного оборудования.
Вместе с тем, слово «аэронавигация» достаточно часто используется и в изначальном, более широком значении, как полеты вообще. В таких, например,
словосочетаниях, как «осенне-зимняя навигация», «аэронавигационная информация», «аэронавигационная комиссия ИКАО» и т.п. Термин
«аэронавигация», рассматриваемый в узком смысле, имеет два взаимосвязанных значения:
- некий протекающий в реальности процесс или деятельность людей по достижению определенной цели;
- наука или учебная дисциплина, изучающая эту деятельность.
Для первого из этих значений можно дать следующее определение.
Аэронавигация – управление траекторией движения ВС, осуществляемое экипажем в полете.
Под управлением вообще понимается приведение объекта управления (того,
чем управляют) в желаемое положение, состояние и т.п. В навигации воздушное судно (ВС) рассматривается как точка, перемещающаяся в пространстве и описывающая при этом линию – траекторию полета. Экипаж в полете управляет как движением этой точки, то есть ее перемещением в пространстве, так и траекторией в целом - ее формой, длиной и т.п.. Преследуемые при этом цели управления могут быть разными, например, в гражданской и военной авиации.
Если для гражданских ВС необходимо добиться возможно более близкого совпадения фактической траектории с заданной, то для военных самолетов заданной траектории может не быть вообще, а основной задачей будет являться,
например, точный выход на цель в заданное время.
В общем случае под «траекторией» в данном определении понимается не просто линия в пространстве, а пространственно-временная траектория, то есть линия, на которой каждая точка соответствует определенному моменту времени.
Это дает возможность отнести к навигационным задачам такие традиционные задачи, как обеспечение выхода в заданную точку в назначенное время,
обеспечение полета по расписанию и т.д. Казалось бы, определяя понятие
аэронавигации, достаточно говорить об управлении ВС как точкой и нет необходимости говорить об управлении траекторией. Но есть ряд задач,
традиционно навигационных, штурманских, касающихся именно траектории,
поскольку траектория в целом имеет и другие свойства, не присущие отдельной ее точке. Например, длина траектории, израсходованное за время полета топливо зависят от всей траектории, являются, как говорят математики, ее функционалами. Поэтому решаемая штурманом задача выбора наилучшей с точки зрения расхода топлива траектории является навигационной задачей.
Осуществляет управление движением ВС его летный экипаж. Специалисты сходятся на том, что как бы ни совершенствовались самолеты, в обозримом будущем человек, по крайней мере, при пассажирских перевозках, все равно будет находиться в их кабинах. Но, разумеется, экипаж осуществляет навигацию с широким использованием различных технических средств. Эти средства снимают с экипажа значительную часть его нагрузки, а на наиболее совершенных ВС оставляют за человеком лишь функции контроля и принятия решений при непредвиденных ситуациях.
Место аэронавигации в иерархии процессов управления полетом. Если задать вопрос «кто управляет движением ВС?», то трудно получить на него однозначный ответ. Слишком многоуровневое, иерархическое это понятие.
Конечно, самолетом управляет пилот, воздействуя на органы управления. Но делает он это так, чтобы выдержать курс, скорость и высоту, задаваемую ему штурманом, который, следовательно, тоже управляет полетом. Штурман в свою очередь рассчитал эти параметры в соответствии с указаниями диспетчера
(например, о выходе в заданный пункт на заданной высоте), значит, и диспетчер управляет ВС. Но и он задает траектории не произвольно, а в соответствии установленными в данном районе схемами движения – трассами, коридорами,
эшелонами. Получается, что органы организации воздушного движения, которые сформировали эти схемы, тоже участники управления полетом. Эту иерархическую лестницу управления ВС можно и дальше продолжать вверх. Но можно продолжить и вниз, заметив, что на самом деле управляют самолетом рулевые машинки автопилота…
Где же в этой иерархии аэронавигация? Она там и тогда, когда ВС можно рассматривать как точку в пространстве, перемещением которой нужно управлять. И разграничить этот процесс со смежными ступенями иерархии управления достаточно просто. Как только мы начинаем рассматривать ВС не как точку, а как объект, имеющий размеры и, следовательно, угловую ориентацию
(курс, крен, тангаж), начинается пилотирование – управление угловым движением. А как только появляется хотя бы два ВС и, как следствие, возникают новые задачи (эшелонирование, предотвращение опасных сближений) -
начинается управление воздушным движением.
Разумеется, нет иного пути изменить траекторию полета, кроме как путем пилотирования. Пилот создает крен и аэродинамические силы заставляют ВС изменить траекторию. Навигация осуществляется посредством пилотирования и эти две составляющие управления неразрывно связаны. Если в составе экипажа есть штурман, то решение навигационных задач возлагается на него, хотя,
конечно, и командир ВС (пилот) не упускает этот процесс из под контроля.
Задачей же пилота является выполнение команд штурмана, обеспечивающих управление траекторией. Если в составе экипажа штурмана нет, то пилот осуществляет и навигацию и пилотирование одновременно.
Требования к аэронавигации. Целью полета гражданского ВС является, как правило, перевозка пассажиров или груза, из одного пункта в другой, либо выполнение определенного вида работ (строительно-монтажных, аэросъемки,
поисково-спасательных операций и т.д.). При осуществлении этих целей к аэронавигации, как правило, предъявляются определенные требования.
1) Безопасность аэронавигации. Это основное требование. Действительно, нет смысла предъявлять к аэронавигации какие-либо требования еще, если существует угроза жизни экипажа и пассажиров, если нет уверенности, что ВС долетит до пункта назначения.
2) Точность. Это требование важно для гражданских ВС, поскольку они выполняют полеты по заданным траекториям. Точность аэронавигации – это степень приближения фактической траектории к заданной. От точности зависит и безопасность, и экономичность полета. Поскольку заданные траектории строят
так, чтобы они были безопасными (не пересекались с препятствиями, другими траекториями), то чем точнее их выдерживает ВС, тем меньше риск. С другой стороны, заданные траектории, как правило, устанавливаются по возможности более короткими. Следовательно, чем точнее выполняется полет, тем короче траектория и меньше время полета.
3) Экономичность. Чем меньше время полета, тем, как правило, меньше себестоимость полета, включающая в себя все сопутствующие затраты – от заработной платы персонала до стоимости израсходованного топлива.
4) Регулярность. Полеты в общем случае должны выполняться по расписанию.
Задержка с вылетом или прилетом не только приносит неудобства пассажирам, но может повлечь и значительные экономические потери. Так, на аэродромах с высокой интенсивностью движения опоздание с прибытием в контрольную точку начала захода на посадку может привести к тому, что ВС отправят в зону ожидания, где оно будет ждать освобождения временного «окна» для захода на посадку, расходуя понапрасну топливо.
Основные задачи аэронавигации. Процесс аэронавигации включает в себя решение трех основных задач:
- формирование (выбор) заданной траектории;
- определение местоположения ВС в пространстве и параметров его движения;
- формирование навигационного решения (управляющих воздействий для вывода ВС на заданную траекторию).
Формирование заданной траектории начинается до полета, обычно задолго до него, когда устанавливается сеть воздушных трасс, заданных высот. В этом случае данную задачу относят не к самой аэронавигации, а к аэронавигационному обеспечению полетов. Но формирование траектории может происходить и оперативно, в полете, когда диспетчер, а иногда и сам экипаж, выбирает в какую точку или по какой линии пути должно следовать ВС. Выбранная тем или иным способом заданная траектория, то есть траектория, по которой необходимо лететь,
должна быть и безопасной и экономичной, в частности не должна не пересекаться
с наземными препятствиями и должна быть по возможности короче.
Определение местоположения ВС в пространстве – одна из основных и настолько важных составляющих навигации, на выполнение которой обычно и направлены основные усилия экипажа, что некоторые отождествляют ее с навигацией в целом, то есть считают, что навигация это только и есть определение местоположения ВС. Действительно, значительная часть бортового и наземного навигационного оборудования предназначена для определения координат самолета и до настоящего времени, за исключением разве что спутниковых навигационных систем, работа с ним занимает значительную часть времени работы экипажа. Но помимо координат необходимо знать параметры движения ВС, то есть скорость и направление перемещения ВС, а иногда его ускорения – без этого невозможно выдержать заданную траекторию.
После того, как местоположение ВС определено и выяснилось, что оно не находится на заданной траектории (а в подавляющем большинстве случаев так и бывает), необходимо определить величину отклонения и принять навигационное решение: каким именно образом должна быть изменена фактическая траектория полета, чтобы ВС вышло на заданную траекторию. Это навигационное решение может иметь вид, например, значений заданного курса, крена или вертикальной скорости, которые штурман передает пилоту. Пилот их реализует (например,
разворачивает самолет на заданный курс) и ВС, изменяя свою фактическую траекторию, приближает ее к заданной. И такая последовательность действий периодически повторяется на протяжении всего полета.
На ВС, на которых процесс аэронавигации в той или иной степени автоматизирован, определение местоположения ВС, да и вывод на заданную траекторию, могут осуществляться автоматически. Навигационным решением штурмана (или пилота, при отсутствии штурмана в составе экипажа) является выбранный режим автоматической работы бортового оборудования. Режимов работы может быть несколько в зависимости, например, от того, по техническим средствам какого вида определяются координаты и параметры движения ВС.
Технические средства навигации . Полеты ВС выполняются и в темное время суток, и над облаками, когда земли не видно, и осуществлять визуальную ориентировку невозможно. Поэтому определение местоположения ВС и
Размер: px
Начинать показ со страницы:
Транскрипт
1 МИНИСТЕРСТВО ОБОРОНЫ РОССИЙСКОЙ ФЕДЕРАЦИИ ВОЕННО-ВОЗДУШНЫЕ СИЛЫ РУКОВОДСТВО ПО ВОЗДУШНОЙ НАВИГАЦИИ АВИАЦИИ ВООРУЖЕННЫХ СИЛ РОССИЙСКОЙ ФЕДЕРАЦИИ Введено в действие приказом главнокомандующего ВВС от 6 декабря 1993 г, 227 МОСКВА ВОЕННОЕ ИЗДАТЕЛЬСТВО
2 Глава I. ОБЩИЕ ПОЛОЖЕНИЯ ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ 1.1. Воздушная навигация комплекс действий экипажа, направленных на достижение наибольшей точности, надежности и безопасности вождения летательного аппарата (ЛА) или группы по заданной траектории, а также в целях вывода их по месту и времени на заданные объекты (цели) и аэродромы посадки. Траектория полета линия, описываемая центром масс ЛА в процессе его движения в воздушном пространстве. Линия пути (ЛП) проекция траектории полета ЛА на земную поверхность. Фактической траектории полета соответствует линия фактического пути (ЛФП), заданной траектории линия заданного пути (ЛЗП). Профиль полета проекция траектории движения ЛА на вертикальную плоскость. Местоположение самолета (МС) проекция его центра масс на земную поверхность к определенному моменту времени Навигационные элементы полета параметры, характеризующие положение и движение ЛА. Они включают координаты места ЛА, высоту полета, воздушную скорость, курс самолета, скорость ветра, направление ветра, угол ветра, курсовой угол ветра, путевую скорость, путевой угол, угол сноса. Высота полета (Н) расстояние по вертикали от начального уровня ее отсчета до ЛА. По начальному уровню различают истинную, относительную, абсолютную высоты и высоту эшелона (рис. 1.1). Истинная высота (Н ист) высота полета над точкой земной (водной) поверхности, находящейся под ЛА. Относительная высота (Н отн) высота полета над условно выбранным уровнем (уровнем аэродрома, цели и др.). Абсолютная высота (Н абс) высота полета над уровнем моря. Высота эшелона (Н эш) высота, отсчитываемая от уровня, который соответствует атмосферному давлению 760 мм рт.ст., в: предположении, что распределение температуры с высотой соответствует стандартным условиям. Рис Классификация высот полета по уровню начала отсчета Воздушная скорость (V) скорость перемещения ЛА относительно воздушной среды. Истинная воздушная скорость (V ист) это фактическая скорость, 2
3 с которой ЛА движется относительно воздушной среды. Скорость по прибору (V пр) скорость, которую показывает прибор, измеряющий воздушную скорость. Курс ЛА (К) угол в горизонтальной плоскости между выбранным опорным направлением и проекцией на эту плоскость продольной оси ЛА. Для отсчета курсов используются следующие опорные направления (рис. 1.2): истинный (геодезический) меридиан С и; магнитный меридиан С м; ортодромический меридиан X в левой ортодромической системе координат или ортодромическая параллель Y в правой ортодромической системе координат; условный меридиан С у любое произвольное (условное) направление для измерения курса с помощью гироскопических курсовых приборов. Рис Опорные направления для отсчета курсов Если опорным направлением является северное направление истинного меридиана, курс ЛА называют истинным (ИК). Если в качестве опорного направления выбран магнитный меридиан, курс ЛА называют магнитным (МК). Если опорное направление определяется с помощью гироскопических курсовых приборов, курс называют условным (УК). Если опорным направлением является ортодромический меридиан или ортодромическая параллель, курс называют ортодромическим (ОК). Для перехода от одной системы отсчета курса к другой используют следующие угловые поправки: магнитное склонение (ΔM) угол, заключенный между истинным и магнитным меридианами; азимутальную поправку (ΔА) угол, заключенный между условным и истинным меридианами; условное магнитное склонение (ΔМ у) угол, заключенный между условным и магнитным меридианами; угол сходимости Δ (угол карты β к) угол, заключенный между истинным и ортодромическим меридианами левой ортодромической системы координат или ортодромической параллелью правой ортодромической системы координат соответственно. Угловые поправки ΔM, ΔА, ΔМ у отсчитываются от 0 до 180º по ходу часовой стрелки со знаком «плюс», против хода часовой стрелки со знаком «минус». Угол сходимости Δ (угол карты β к) отсчитывается по ходу часовой стрелки от 0 до 360º. 3
4 Скорость ветра (U) скорость горизонтального перемещения воздушных масс относительно земной поверхности. Направление ветра (δ) угол в горизонтальной плоскости, заключенный между тем же опорным направлением, от которого измеряется курс, и вектором ветра. Угол ветра (УВ) угол, заключенный между вектором путевой скорости и вектором ветра. Курсовой угол ветра (КУВ) угол, заключенный между вектором воздушной скорости и вектором ветра. Путевая скорость (W) скорость перемещения ЛА относительно земной поверхности. Расчетная путевая скорость (W p) скорость ЛА, определенная по известному ветру. Фактическая путевая скорость (W ф) это текущее значение путевой скорости. Путевой угол (ПУ) угол в горизонтальной плоскости между выбранным направлением отсчета курса и вектором путевой скорости. Угол сноса (УС) угол, заключенный между векторами воздушной и путевой скорости. Навигационный параметр это измеряемая в полете или на земле некоторая величина, определенным образом зависящая от координат ЛА Линия положения геометрическое место точек вероятного местоположения ЛА, характеризующаяся постоянством измеренного навигационного параметра. Линия равных расстояний (ЛРР) линия положения, в каждой точке которой дальность от ЛА до фиксированной точки на земной поверхности есть величина постоянная. Линия равных азимутов (пеленгов) (ЛРА) линия положения, характеризуемая постоянством измеренного азимута (пеленга). Линия равных разностей расстояний (ЛРРР) линия положения, в каждой точке которой разность расстояний от ЛА до двух фиксированных точек на земной поверхности есть величина постоянная Автоматизированные системы навигации позволяют более полно реализовать боевые возможности ЛА. К таким заказам относятся навигационные системы (комплексы) и прицельно-навигационные системы (комплексы). Навигационная система (комплекс) совокупность функционально связанных бортовых средств и систем, обеспечивающих автоматизированный полет ЛА по заданной программе. Прицельно-навигационная система (комплекс) (ПНС) совокупность функционально связанных бортовых средств и систем, обеспечивающих автоматизированный полет и боевое применение средств поражения ЛА по заданной программе Воздушная навигация осуществляется на всех этапах полета. При этом должны соблюдаться следующие ее основные правила: достижение высокой точности, надежности и безопасности вождения ЛА (групп) по заданной траектории; обеспечение надежного вывода ЛА (групп) на заданные цели (аэродромы посадки) в различных условиях тактической обстановки; строгое выдерживание программы и штурманского плана полета; непрерывный и надежный контроль за работоспособностью комплекса (системы), своевременная коррекция координат места ЛА; готовность летчика (экипажа) в любой момент времени перейти на неавтоматизированную навигацию; постоянная оценка условий выполнения полета и своевременное внесение изменений в 4
5 программу полета; умелое сочетание автоматизированного и автономного полета при боевом маневрировании; постоянная готовность к перенацеливанию, целеуказанию и выходу на цели в усложнившейся обстановке; обеспечение качественного решения основных навигационных задач при полете с не полностью подготовленной программой Под обеспечением безопасности воздушной навигации понимается создание условий полета, исключающих: столкновение и опасное сближение самолетов в воздухе; столкновение ЛА с земной (водной) поверхностью и препятствиями на ней; вынужденные посадки ЛА из-за полной выработки топлива; непредусмотренный вход в запретную зону (приграничную полосу); потерю ориентировки в полете Расчеты по обеспечению безопасности воздушной навигации носят вероятностный характер. Исходными данными для выполнения расчетов являются статистические характеристики точности навигации, а именно математические ожидания и средние квадратические отклонения ошибок выдерживания ЛЗП, времени выхода в заданные точки, выдерживания заданной высоты (эшелона) полета. Указанные выше характеристики используются для расчета предельных ошибок выдерживания ЛЗП (ширины полосы маршрута), предельных ошибок времени выхода в заданные точки, предельных ошибок выдерживания заданной высоты (эшелона) полета, на основании которых осуществляется выбор взаимного положения траекторий полета и ЛА в воздушном пространстве Под шириной полосы маршрута понимается симметричная относительно ЛЗП полоса, за пределы которой ЛА с заданной гарантийной вероятностью Р о не выйдет за все время полета на этапе (этапах) маршрута. Ширина полосы маршрута характеризуется удалением ее границ от ЛЗП на расстояние ±С, км. Предельные ошибки во времени выхода в заданные точки это возможное отклонение фактического времени выхода в заданные точки (на рубеж) от расчетного для соответствующей гарантийной вероятности Для исключения случаев столкновений ЛА с земной или водной поверхностью и препятствиями на них полеты должны планироваться и выполняться на высотах не менее безопасных. Полеты на высотах менее безопасных запрещаются. Безопасная высота полета это минимальная высота, гарантирующая ЛА от столкновения его с земной (водной) поверхностью и расположенными на ней препятствиями. В зависимости от уровня, принятого за начало отсчета, безопасная высота может быть истинной, относительной и абсолютной. Основными правилами полетов в воздушном пространстве РФ, КБП и инструкциями (руководствами) по летной эксплуатации ЛА определены истинные безопасные высоты для полетов в районе аэродрома, по кругу, по маршруту ниже нижнего эшелона и при расчете минимального безопасного эшелона. Истинной безопасной высотой полета называется минимальная заданная высота относительно пролетаемой местности и искусственных препятствий, гарантирующая ЛА от столкновений его с земной (водной) поверхностью или препятствиями на ней. 5
6 1.10. Исключение случаев попадания в запретные и опасные зоны достигается установлением минимально допустимого удаления маршрута от границ зоны, исключающего с заданной гарантийной вероятностью попадание ЛА в пределы запретных (опасных) зон Ориентировка считается потерянной, если экипаж ЛА не знает своего местонахождения и не может определить его с точностью, необходимой для продолжения дальнейшего полета в целях выполнения поставленной задачи. ОСНОВНЫЕ ЗАДАЧИ ВОЗДУШНОЙ НАВИГАЦИИ Основой навигации является принцип комплексного применения технических средств, который предусматривает: непрерывное определение места ЛА счислением пути; периодическую коррекцию счисленных координат ЛА с помощью технических средств и визуальной ориентировки; оценку показаний различных средств, используемых для счисления и коррекции места ЛА, и выбор для решения этих задач тех средств и способов, которые в данных условиях обеспечивают наибольшую точность и надежность навигации; вычисление параметров для полета по заданной траектории на основе обобщенной и оптимально обработанной информации о местоположении ЛА. Процесс воздушной навигации включает следующие типы операций: управление датчиками навигационной информации и навигационными устройствами (включение, настройка, измерение навигационных элементов полета и параметров); решение логических задач (оценка и выбор средств и способов счисления и коррекции места ЛА, опознавание ориентиров, расшифровка изображения на экранах различных визиров, оценка и уточнение программы полета и видов маневра); решение вычислительных задач (счисление координат, вычисление координат по измеренным параметрам, определение ветра, вычисление параметров для выполнения полета по заданной траектории) Навигация осуществляется экипажем (летчиком) путем решения на земле при подготовке к полету и в полете ряда задач. Основными задачами, решаемыми н а земле, являются: выбор маршрута и профиля полета, расчет полета, прокладка маршрута на полетной карте; подготовка полетной карты, включающая построение сетки ортодромической системы координат; отметка превышений местности, наземных станций радионавигационных систем и ориентиров коррекции; нанесение необходимых условных знаков, характеризующих тактическую обстановку; склейка карт для автоматического планшета; выбор и подготовка микрофильмов для навигационных индикаторов и индикаторов навигационно-тактической обстановки; подготовка и расчет исходных данных для разработки программы полета, составление программы, программирование полета. В п олете экипажем решаются следующие основные навигационные задачи: измерение навигационных параметров и элементов полета; счисление пути; коррекция результатов счисления пути и курса; определение условий перехода на очередной этап маршрута полета; определение управляющих параметров, обеспечивающих движение ЛА по заданной траектории и выход в заданные точки траектории в назначенное время; расчет параметров, определяющих положение ЛА относительно других ЛА в боевом порядке и обеспечивающих сохранение заданного места в боевом порядке (задача межса- 6
7 молетной навигации); разработка и ввод в полете параметров новой траектории полета (перенацеливание); обеспечение предпосадочного маневрирования в соответствии с принятой в ПНС схемой. 7
8 Глава II. ВОЗМОЖНОСТИ ТЕХНИЧЕСКИХ СРЕДСТВ ВОЗДУШНОЙ НАВИГАЦИИ ГЕОТЕХНИЧЕСКИЕ СРЕДСТВА НАВИГАЦИИ Средства определения высоты и скорости полета 2.1. Средства определения высоты и скорости полета предназначены для измерения элементов движения ЛА относительно воздушной среды: барометрической высоты, истинной и приборной воздушной скорости, числа М полета. К ним относятся барометрические высотомеры, указатели воздушной скорости и числа М, централи скорости и высоты (ЦСВ), системы воздушных сигналов (СВС). Принцип действия их основан на измерении с помощью приемников типа ПВД статического Р и полного Р п давления набегающего потока воздуха, а также температуры Т т, заторможенного потока. При решении функциональных зависимостей, связывающих измеренные величины с навигационными элементами, используются параметры стандартной атмосферы СА-81 при различных значениях абсолютной высоты Н абс, значения которых приведены в прил Погрешности измерения высоты барометрическим методом делятся на инструментальные и методические. Инструментальные погрешности измерения высоты характеризуются величиной средней квадратической ошибки σн, которая определяется по формуле σн = а + bн. Коэффициенты а и b для устройств различных типов приведены в табл Таблица 2.1 Коэффициенты а и b для высотомеров различных типов Вид устройства а b 7 м 3 м 5-7 м Механический высотомер Электромеханический высотомер СВС с электромеханическим вычислителем Для СВС с электронным вычислителем эта погрешность характеризуется величиной σн = (0,03 0,4)% Н в диапазоне высот м и σн = 1% Н на высотах более м. К методическим погрешностям систем и приборов определения высоты и скорости относятся аэродинамическая, температурная и барометрическая погрешности. Аэродинамическая погрешность возникает вследствие искажений статического давления в месте его измерения (на ПВД). Для барометрических высотомеров она учитывается с помощью поправочных таблиц, в СВС и электромеханических высотомерах автоматически с помощью специальных блоков компенсации. Температурная погрешность проявляется при определении истинной высоты в связи с отличием фактического распределения температур от стандартного, принятого в расчетных формулах. Приближенно ее величина равна DНт = 0,4DТ Н ср, где ΔТ ср разность между фактической и стандартной средними температурами. 8
9 Барометрическая погрешность возникает при определении относительной барометрической или истинной высоты полета за счет неточного учета давления на начальном уровне. Ее величина приближенно равна ΔН б = 11 ΔР з, где ΔР з разность между фактическим давлением на заданном уровне и давлением, введенным в высотомер (СВС), в миллиметрах ртутного столба При определении приборной скорости с использованием механических указателей в расчет принимаются значения температуры и давления на нулевой высоте в стандартных условиях (Р = Р 0 СА, Т Н = Т 0 СА). Истинная скорость в комбинированных указателях скорости (КУС) рассчитывается по значениям температуры и давления на высоте полета для стандартной атмосферы (Р = Р Н СА, Т Н = Т Н СА). Инструментальные погрешности измерения воздушной скорости характеризуются относительной средней квадратической ошибкой σv = (1 3 %) V. Методическая погрешность измерения воздушной скорости присуща механическим указателям скорости. Она обусловлена отличием фактической температуры воздуха на высоте полета от стандартной и приближенно равна DV % = 0,2DTH. Ł V ł Средства определения и выдерживания направления полета ЛA 2.4. К средствам определения и выдерживания направления полета относятся магнитные компасы, гироскопические приборы и устройства, курсовые системы и курсовертикали, астрономические курсовые приборы Для измерения курса используются три способа: магнитный, гироскопический и астрономический. Магнитный и астрономический способы применяются для начальной выставки курсовых (инерциальных) систем. Гироскопический способ является основным. Он реализован в курсовых системах, курсовертикалях и инерциальных навигационных системах Курсовые системы предназначены для измерения и выдерживания курса ЛА. Они основаны на комплексировании курсовых приборов различных принципов действия. Основу курсовой системы составляет курсовой гироскоп (гироагрегат), который может дублироваться в целях повышения надежности. Как средство измерения курса курсовой гироскоп является гирополукомпасом (ГПК). Гирополукомпас не обладает способностью устанавливаться в заданном направлении и в последующем следить за этим направлением. Вследствие этого он нуждается в начальной выставке в принятой системе измерения курса и периодической коррекции с привлечением внешних источников курсовой информации. С помощью гирополукомпаса измеряется условный курс, что накладывает ограничения на область его применения для измерения курса в сферических системах координат. Курсовые системы имеют следующие режимы работы: гирополукомпаса (ГПК), который является основным; магнитной коррекции (МК); заданного курса (ЗК). В курсовых системах многоместных ЛА дополнительно может быть предусмотрен 9
10 режим астрономической коррекции (АК) Режим гирополукомпаса используется для измерения ортодромического курса в ограниченном районе или в ограниченной полосе относительно некоторой ортодромии. Ограничения на область применения ГПК обусловлены неполным учетом скорости прецессии его главной оси в азимуте. Полная угловая скорость вращения главной оси ГПК в азимуте на подвижном ЛА в любой сферической системе координат (при отсутствии собственного ухода) w а W = w sin П з j + tgs, R где φ сферическая широта; ω з угловая скорость вращения Земли (ω з = 15 º/ч); W П составляющая путевой скорости по направлению параллели в системе координат, принятой для измерения курса; σ широта в этой системе координат; R радиус земной сферы. В гирополукомпасах учитывается только первая составляющая угловой скорости ω а. Поэтому при больших удалениях от экватора сферической системы координат (ортодромии) в его показаниях возникают погрешности, обусловленные второй составляющей (погрешности из-за неучета перемещения ЛА). Для уменьшения этих погрешностей при применении ГПК за экватор принимают главную (частную) ортодромию с таким расчетом, чтобы полет выполнялся на небольших удалениях от нее (σ 0). Ортодромический курс при этом может измеряться как от ортодромического меридиана, так и от ортодромической параллели. Погрешности измерения курса в режиме гирополукомпаса определяются неучтенной составляющей угловой скорости вращения главной оси в азимуте, дискретным учетом широты и собственным уходом гироскопа. Величина погрешности ΔК s из-за неучета перемещения ЛА характеризуется приближенным равенством 60 D Ks» SXср, 2 R где S длина ортодромического этапа полета; X ср его среднее удаление от главной ортодромии. Допустимая длина этапа S д для установленной ошибки в курсе Δψ s 0,5 при различных значениях Х ср приведена в табл Таблица 2.2 Допустимая длина этапа S д для установленной ошибки ΔК s = 0,5 Х ср, км S Д, км Погрешность за счет дискретного ввода широты приближенно равна ΔК φ = ω з cosφ 0 Δφt, где φ 0 широта, введенная в курсовую систему; Δφ изменение широты; 10
11 t время полета с постоянной установкой широты. При допустимой ошибке ΔК φ < 0,5 установку широты необходимо менять через минут полета. Погрешность за счет собственного ухода гироагрегата характеризуется величиной D w с К = wсt, где ω с угловая скорость собственного ухода гироагрегата Режимы магнитной коррекции курсовой системы используются для начальной выставки гироагрегата и периодической коррекции курса в полете. В качестве датчиков магнитного курса в курсовых системах служат индукционные датчики, применяемые совместно с коррекционными механизмами. Для приведения магнитного курса к принятой для гирополукомпаса системе измерения курса учитывается условное магнитное склонение. Его величина в общем виде определяется соотношением ΔМ У = ΔА + ΔМ, где ΔА угол между принятым началом измерения курса в режиме гирополукомпаса и истинным меридианом; ΔМ магнитное склонение. Основной погрешностью магнитных датчиков курса является девиация, для устранения которой на курсовых системах в установленные сроки проводятся девиационные работы. Коррекцию курса в полете по магнитному датчику необходимо выполнять в горизонтальном установившемся режиме Режим заданного курса предназначен для начальной выставки курсовой системы в соответствии с принятой системой измерения курса. Для начальной выставки любым доступным способом определяется стояночный курс ЛА, который вводится в курсовую систему с пультов управления Курсовертикали в отличие от курсовых систем служат для измерения и выдерживания не только курса ЛА, но и углов крена и тангажа. Курсовертикали могут иметь маятниковую или интегральную коррекцию. Курсовертикали с маятниковой коррекцией (системы курса и вертикали СКВ) как курсовые приборы полностью аналогичны курсовым системам. Инерциальные курсовертикали (ИКВ) с интегральной коррекцией в зависимости от конкретных особенностей навигационного комплекса могут работать в режиме гирополукомпаса или обеспечивать измерение истинного и ортодромического курса. Инерциальные навигационные системы Инерциальные навигационные системы (ИНС) предназначены для автономного непрерывного определения пространственного положения ЛА ИНС имеют следующие основные режимы эксплуатации: «Обогрев», «Выставка», «Работа». Режим «Обогрев» предназначен для создания температурных условий, обеспечивающих нормальную работу всех элементов системы Режим «Выставка» служит для подготовки системы к работе и включает 11
12 выставку гироплатформы в плоскость горизонта и в азимуте, определение и учет собственных уходов гироскопа. Горизонтирование гироплатформы осуществляется обычно в два этапа. На первом из них гироплатформа приводится к осям самолета по соответствующим сигналам рассогласования, на втором в плоскость горизонта по сигналам акселерометров. Все операции по горизонтированию гироплатформы автоматизированы, для их выполнения необходимы лишь координаты точки стояния ЛА. В процессе горизонтирования гироплатформы определяются и компенсируются собственные уходы горизонтирующих гироскопов. Выставка ИНС в азимуте может быть выполнена установкой по заданному курсу, гирокомпасированием и двойным гирокомпасированием. Для выставки по заданному курсу необходимо любым доступным способом определить стояночный курс ЛА и ввести его с пульта управления. Выставка по заданному курсу выполняется на стоянках, подготовленных в геодезическом отношении. С этой целью ЛА устанавливается на маркированную точку, из которой предварительно измерен азимут А ор на удаленный ориентир. С помощью теодолита или другого пеленгаторного устройства с ЛА измеряется курсовой угол ориентира (КУО). Стояночный курс определяется как разность: Кст = Аор - КУО Возможна выставка ИНС и по магнитному датчику курса. Эти способы выставки наиболее оперативны, но точность их полностью определяется точностью исходной информации о стояночном курсе. Их рекомендуется применять в случаях экстренного вылета, когда другие способы неприемлемы по располагаемому времени. Гирокомпасирование способ выставки гироплатформы в азимуте по данным самой инерциальной системы без привлечения внешней информации. Гирокомпасирование является заключительным этапом горизонтирования и основано на определении различия вычисленных для точки стояния ЛА скоростей прецессии гироплатформы по осям навигационной системы координат и их фактических значений. Исходной информацией для гирокомпасирования являются показания акселерометров. Точность выставки методом гирокомпасирования зависит от скорости собственного ухода горизонтирующих гироскопов и характеризуется величиной примерно 1. Двойное гирокомпасирование предполагает последовательную установку гироплатформы в азимуте по двум взаимно перпендикулярным осям, соответствующим двум акселерометрам, служащим для измерения горизонтальных ускорений. Такой метод позволяет определить и скорректировать собственные уходы горизонтирующих гироскопов и повысить тем самым точность выставки до десятков угловых минут. В качестве исходных данных для выставки инерциальной системы навигации служат координаты точки стояния ЛА (в навигационной системе координат) и геодезическая широта Режим «Работа» ИНС является основным ее режимом, в котором определяются координаты ЛА, курс, углы крена и тангажа. В этом режиме по измеренным с помощью акселерометров ускорениям определяются составляющие вектора путевой скорости по осям гироплатформы, которые в функциональном вычислителе или БЦВМ преобразуются к навигационной системе координат. Текущие координаты ЛА определяются путем повторного интегрирования ускорений с учетом начальных условий. Начальными условиями для счисления пути служат координаты ЛА в точке включения инерциальной системы навигации в режим «Работа». 12
13 РАДИОТЕХНИЧЕСКИЕ СРЕДСТВА НАВИГАЦИИ ЛА Угломерные радионавигационные системы Угломерными называются радионавигационные системы, с помощью которых измеряется угол между некоторым начальным направлением и направлением на передающую станцию. В зависимости от места размещения приемных и передающих устройств они делятся на радиокомпасные и радиопеленгаторные. Радиокомпасная угломерная система состоит из автоматического радиокомпаса (АРК) и наземной передающей радиостанции. С помощью АРК на борту ЛА измеряется курсовой угол радиостанции (КУР), который обеспечивает привод самолетов на радиостанцию и определение линии положения. Пеленг радиостанции (ПР) рассчитывается как сумма курсового угла радиостанции и курса летательного аппарата: ПР = К + КУР В зависимости от измеряемого курса пеленг может быть истинным, магнитным или условным. Пеленг ЛА определяется по формуле ПС = ПР ΔА ± 180, где ΔА азимутальная поправка для точки расположения радиостанции, рассчитанная для принятой системы измерения курса. Радиопеленгаторная система состоит из наземного радиопеленгатора и бортовой приемопередающей радиостанции. Радиопеленгаторы работают в диапазонах ультракоротких (АРП) или коротких радиоволн. 13
14 Радиопеленгаторы типа АРП используются для контроля пути и привода ЛА на аэродромы или в другие пункты. С их помощью измеряются магнитные пеленги ЛА, которые для передачи на борт изменяются на 180 (по кодовому запросу «Прибой»): МПР = МПС ± 180 Такая величина соответствует магнитному курсу полета на пеленгатор. При измерении условного курса учитывается условное магнитное склонение: УПР = МПР + ΔМ У Величина ΔМ У рассчитывается для принятого начала измерения курса. Коротковолновые пеленгаторы сводятся в радиопеленгаторные базы и по специальному запросу выдают на борт ЛА координаты его местонахождения. Угломерно-дальномерные радионавигационные системы Угломерно-дальномерные радионавигационные системы относятся к числу смешанных, поскольку с их помощью одновременно измеряются азимут ЛА и расстояние от него до наземной станции. К ним относятся радиомаячные системы типа РСБН. В интересах навигации могут также использоваться наземные РЛС. С помощью системы РСБН на борту ЛА и на наземной станции измеряются истинный азимут и наклонная дальность от ЛА до радиомаяка РСБН. В составе навигационных комплексов система РСБН применяется для решения следующих задач: коррекции счисленных координат; построения предпосадочного маневра и захода на посадку; определения взаимного положения ЛА при решении задач межсамолетной навигации. Дальность действия системы РСБН зависит от высоты полета ЛА и рельефа местности в районе применения системы. Для равнинной местности она рассчитывается в километрах по формуле Dmax = 3,7(hотн + Нотн), где Н отн, h отн высоты полета и антенной системы радиомаяка соответственно, отсчитанные от среднего уровня рельефа, м. При наличии на пути распространения радиоволн экранирующих препятствий дальность действия определяется из соотношения Ø Dmax = d1 + 6,87Œ Œ Œº 2 ø Dh Dh 0,073d ,29DH - 0,073d œ 1 +, Ł d1 ł Ł d œ 1 ł œß 14
15 где d 1 расстояние от радионавигационной станции до экранирующего препятствия, км; Δh превышение препятствия над радиоизлучателем, м; ΔН относительная высота полета самолета, м. Величины Δh, ΔН рассчитываются по соотношениям: Dh = hпр - (h + h) a DН = Набс - hпр, где H абс абсолютная высота полета; h пр абсолютная высота препятствия; h а абсолютная высота точки установки антенной системы радиомаяка; h м высота мачты антенной системы. Практически задачи по определению дальности действия решаются с помощью номограммы (приложение 3). Разностно-дальномерные радионавигационные системы Разностно-дальномерные радионавигационные системы типа РСДН предназначены для определения координат ЛА по результатам измерения разностей расстояний до наземных станций. В состав системы РСДН входят наземные радионавигационные станции и бортовое оборудование. Наземные станции объединяются в группы (цепочки), включающие не менее трех станций, которые могут быть как стационарными, так и мобильными. Для каждой из пар станций, входящих в одну группу, на ЛА измеряется разность времени распространения радиосигналов, излучаемых в определенной последовательности. Измеренная временная разность эквивалентна разности расстояний от наземных станций до ЛА, что обеспечивает определение линии положения в виде линии равных разностей расстояний (гипербол). По двум линиям положения определяются координаты ЛА интерполяцией между нанесенными изолиниями на специальных картах или с помощью бортовых вычислителей. С помощью современных разностно-дальномерных систем временные разности с учетом поправок на распространение радиоволн измеряются с точностью σ τ = 0,15-0,2 мкс, что обеспечивает определение координат ЛА с ошибкой 0,07-0,15 км. Для применения разностно-дальномерных систем, имеющих вычислители или входящих в состав навигационных комплексов, определяются следующие исходные данные: геодезические координаты наземных станций (основной и запасной цепочек); временные кодовые задержки для выбранной цепочки; поправки на условия распространения радиоволн. Измерения и преобразования координат осуществляются автоматически, и их результаты в виде ортодромических или геодезических координат используются для коррекции системы счисления пути. Бортовые радиолокационные станции Бортовые радиолокационные станции (БРЛС) обеспечивают наблюдение на земной (водной) поверхности и в воздушном пространстве объектов, обладающих радиолокационной контрастностью. Это позволяет определить положение ЛА относительно обнаруженного объекта, что служит основой для решения следующих задач: ведения ориентировки по условному изображению местности; определения координат ЛА по линиям положения; предупреждения столкновения с объектами, представляющими опасность для ЛА; встречи с другими ЛА и выдерживания места в боевом порядке. м; 15
16 Дальность обнаружения радиолокационных ориентиров зависит от их характера, длины рабочей волны, высоты полета и других факторов и изменяется в пределах от десятков до сотен километров. Современные БРЛС, как правило, обеспечивают обзор в переднем секторе до 180 на различных масштабах с возможностью задержки начала развертки. Для выделения подвижных объектов они могут иметь режим селекции движущихся целей. Для обеспечения полета на малых высотах с огибанием рельефа местности могут применяться специальные или многорежимные бортовые радиолокационные станции. В таком режиме работы их функцией является определение высоты полета над рельефом, расположенным впереди ЛА в определенном секторе. По результатам измерения формируются сигналы для автоматического (директорного) управления полетом ЛА или горизонтальное либо вертикальное сечение рельефа впередилежащей местности с отображением его на индикаторе. Доплеровские измерители путевой скорости и угла сноса (ДИСС) Принцип действия ДИСС основан на измерении частного сдвига, возникающего в отраженном от земной поверхности сигнале при облучении ее с движущегося ЛА. Геометрическая форма многолучевой диаграммы направленности ДИСС обеспечивает измерение трех составляющих скорости ЛА в системе координат, связанной с антенной. Для пересчета составляющих путевой скорости из антенной системы координат в горизонтальную применяются специальные вычислители или вычислительные устройства навигационных комплексов, в которых учитываются фактические углы крена и тангажа ЛА. Путевая скорость W и угол сноса УС рассчитываются по значениям продольной W Пx и поперечной W Пz горизонтальных составляющих вектора скорости ЛА: 2 2 W = WПх + WПz ; W УС = arctg Пz. WПx Для счисления пути обычно используются непосредственно величины W Пx и W Пz, преобразованные с учетом курса ЛА к принятой в навигационном комплексе системе координат. Одновременно с измерением скорости ДИСС могут использоваться и для определения высоты полета (ДИСС РВ), что позволяет применять их для измерения высоты рельефа в корреляционно-экстремальных системах навигации. АСТРОНОМИЧЕСКИЕ СРЕДСТВА И СИСТЕМЫ НАВИГАЦИИ Астрономические курсовые приборы астрокомпасы предназначены для измерения курса путем пеленгации небесных светил. В настоящее время широко используются два типа астрокомпасов: дистанционный астрономический компас типа ДАК-ДБ и совмещенный астрокомпас типа АК-59П. В ДАК-ДБ осуществляется автоматическая пеленгация Солнца с помощью фотоэлектрической следящей системы. На ЛА, где ДАК-ДБ применяется совместно с перископическим секстантом СП-1М, возможно измерение курса в ночном полете пеленгацией Луны, планет и звезд. Совмещенный астрокомпас типа АК-59П позволяет измерять курс самолета путем визуальной пеленгации Солнца, Луны, планет и звезд. При этом за счет наличия поляризационной системы в АК-59 возможно измерение курса в следующих условиях: при высоте Солнца не менее 7 ; 16
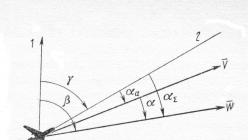
17 при закрытии Солнца облаками, когда в плоскости круга склонения Солнца имеются разрывы облачности; при установке АК-59П в тех местах ЛА, где по условиям обзора непосредственная пеленгация Солнца не может проводиться, но имеется возможность наблюдать участки неба в плоскости круга склонения Солнца Астрономические компасы позволяют измерять истинный ортодромический и условный курсы ЛА. Для измерения истинного курса в астрокомпас вводятся гринвичский часовой угол t rp и склонение светила, рассчитанные на текущий момент времени. Значение t гр для Солнца, Луны и планет выбирается из авиационных астрономических ежегодников (ААЕ), а для звезд рассчитывается по формуле t гр = S гр а, где S rp звездное время на меридиане Гринвича; а прямое восхождение звезды, выбираемое из ААЕ. В дальнейшем t гp отрабатывается с помощью часового механизма. В момент измерения курса в астрокомпас вводятся координаты места самолета широта и долгота, погрешность установки которых не должна превышать 30". В тот же момент стрелка пройденного расстояния путевого корректора ДАК-ДБ должна быть установлена на нуль. Для измерения курса во всех случаях следует выбирать светило с меньшей высотой. Истинный курс ЛА определяется как разность азимута А светила, рассчитанного в астрокомпасе по его экваториальным координатам на текущий момент времени, и курсового угла светила КУ, измеренного в процессе пеленгации. ИК = А КУ С увеличением широты места ЛА погрешности в измерениях истинного курса возрастают, поэтому в высоких широтах следует использовать или ортодромический, или условный курс. При определении ортодромического курса (рис. 2.1) в измеренный истинный курс самолета вводится азимутальная поправка ΔА, равная текущему путевому углу ортодромии β, взятому со знаком минус: ОК = ИК + ΔА, ΔА = - β Этот способ применим для астрокомпасов всех типов. Для измерения ортодромического курса с погрешностью не более 2 ошибка в вычислении азимутальной поправки должна быть, не более 30". При расчете условного курса в истинный курс самолета вводится азимутальная поправка, равная углу схождения меридианов б места самолета и той точки, относительно меридиана которой измеряется курс с обратным знаком: УК = ИК + ΔА; ΔА = - δ Особенность применения астрокомпаса АК-59П в ночном полете заключается в 17
18 том, что пеленгация светил производится с помощью визирной системы, в которой вращение Земли автоматически не компенсируется. Поэтому при каждом измерении курса необходимо устанавливать значение гринвичского часового угла пеленгуемого светила. Его значение можно получить с помощью ААЕ или определить по шкале часовых углов нижней визирной системы астрокомпаса при предварительной установке значения t гp на некоторый момент времени. Рис К принципу определения ортодромического курса Выдерживание курса с помощью астрокомпасов возможно после установки гринвичского часового угла и склонения светила. С помощью ДАК-ДБ обеспечивается полет по ортодромии. При этом этапы маршрута не должны превышать по длине 1100 км, а их путевые углы должны определяться с точностью не хуже 0,5. В начале каждого этапа в астрокомпас вводятся координаты пролетаемого ППМ, уточняется значение путевой скорости, а стрелка пройденного пути устанавливается на нуль. После пролета ППМ берется курс, равный путевому углу этапа с учетом угла сноса. В полете периодически уточняются значения пройденного пути и путевой скорости путевого корректора. Астрокомпасы, не имеющие автоматической компенсации перемещения самолета, также могут применяться для выдерживания курса. При этом используется методика, позволяющая определить курс относительно среднего меридиана этапа маршрута. В астрокомпас вводятся значения гринвичского часового угла и склонения светила на момент пролета ППМ, а также широта и долгота средней точки очередного этапа. После пролета ППМ берется курс, равный путевому углу этапа маршрута в средней точке с учетом угла сноса. Если угол сноса не изменяется, полет на всем протяжении этапа выполняется с постоянным курсом. При выполнении полета таким способом с помощью ДАК-ДБ обе стрелки путевого корректора устанавливаются на нуль. Полет с использованием средних меридианов выполняется по так называемой «астрономической локсодромии», полюсом которой является географическое место светила. При длине этапа км уклонение астрономической локсодромии от линии заданного пути не превышает 5 км Применение звездно-солнечного астроориентатора позволяет в условиях ночного полета определять координаты и курс ЛА, а в дневном полете истинный или ортодроми- 18
19 ческий курс. Для использования астроориентатора в полете необходимо задать положение главной ортодромии, которое определяется координатами ее полюса широтой σ и долготой L. В ЗСО используется правая ортодромическая система координат. Поэтому полюсом главной ортодромии будет точка, отстоящая от всех точек ортодромии на 90, из которой положительное направление главной ортодромии наблюдается совпадающим с направлением движения часовой стрелки. Расчет координат полюса главной ортодромии может быть выполнен аналитически, с помощью номограмм, с помощью вычислителя ЗСО. Требуемая точность вычисления σ и L составляет 5". Ортодромический курс в ЗСО определяется как разность между истинным курсом и текущим путевым углом ортодромической параллели: ОК = А КУ β о = ИК β о, где А азимут светила; КУ курсовой угол светила; β о путевой угол ортодромической параллели. В ЗСО измерение высот и курсовых углов светил осуществляется с помощью автоматических секстантов, стабилизированных в плоскости горизонта с помощью центральной гировертикали. В целях их начального наведения на светила в вычислителе ЗСО по введенным экваториальным координатам светил, координатам места ЛА и курсу вычисляются значения курсовых углов и высот светил. После захвата светил секстантами работа ЗСО может осуществляться в двух режимах: слежения за двумя или слежения за одним светилом. Слежение за двумя светилами возможно при высоте Солнца h o - 7 и высоте звезд 10 h 70, разность азимутов светил в этом случае должна быть 30 ΔА 150. Точность определения места самолета характеризуется средним квадратическим радиальным отклонением км, точность определения курса средним квадратическим отклонением 0,3. При слежении за одним светилом в ЗСО определяется только курс, точность его определения характеризуется СКО 0,5. Для обеспечения работы ЗСО в режиме слежения в его вычислитель необходимо ввести звездное гринвичское время, экваториальные координаты светил, координаты места и курс ЛА. Допустимые отклонения при вводе этих величин составляют ±10 с по S гр ±1 по координатам места ЛА, ±1,5 по курсу. При этом ошибки ввода координат и курса могут быть компенсированы в режиме поиска звезд путем ручного разворота секстанта, а в дальнейшем исключены по данным пеленгации светил. Ошибки ввода S гр и экваториальных координат светил приводят к невозможности пеленгации, неправильному определению координат места ЛА, его курса и по результатам пеленгации компенсироваться не могут Применение астроинерциальных систем, входящих в состав ПНС ЛА, позволяет определять геодезические и ортодромические координаты места ЛА, проекции на оси применяемой системы координат векторов путевой скорости и абсолютного ускорения, углы ориентации гироплатформы, включая и курс ЛА, а также вычислять поправки в координаты и курс ЛА и обеспечивать навигационной информацией другие системы и агрегаты ЛА. В состав любой астроинерциальной системы в качестве основных ее элементов входят астрокорректор, гироскопическая платформа и цифровая вычислительная машина. Астрокорректор предназначен для пеленгации светил, слежения за ними в полете и выдачи информации об отклонениях фактического положения светила на небесной сфере от расчетного, вычисленного в ЦВМ. В современных АИС отклонения в положении светил определяются в горизонтальной системе небесных координат (Δh* и ΔА). По этим данным в ЦВМ рассчитываются поправки в счисленные с помощью инерциальной части системы координаты и курс ЛА. Для вычислений в систему необходимо предварительно ввести дату полета, московское декрет- 19
20 ное время, положение главной ортодромии, координаты точки старта. Стабилизация астрокорректора в пространстве осуществляется с помощью гироплатформы. Корректор может быть установлен непосредственно на платформе или связан с ней с помощью следящих систем. Кроме стабилизации астрокорректора гироплатформа обеспечивает построение приборной системы координат, определение углов ориентации самолета и служит датчиком первичной навигационной информации для решения задачи счисления координат. Управление гироплатформой осуществляется с помощью ЦВМ. Цифровая вычислительная машина обеспечивает: вычисление координат полюса главной ортодромии и начальных ортодромических координат ЛА, управление датчиками моментов гироплатформы, вычисление геодезических и ортодромических координат ЛА с астропоправками, вычисление курса и астропоправок к нему, вычисление составляющих путевой скорости по осям координат и поправок к ним, определение постоянных составляющих дрейфов гироскопов гироплатформы, выбор экваториальных координат пар светил, находящихся в рабочей области астрокорректора, управление телеблоком астрокорректора. В современных астроинерциальных системах большинство указанных задач решается автоматически. Использование в качестве навигационных звезд, видимых в инфракрасном диапазоне волн, позволяет применять эти системы днем так же, как и ночью. В качестве одного из светил днем может быть использовано Солнце. Область применения систем на земном шаре практически не ограничена. Рабочая область пеленгации астрокорректором ограничена по условиям исключения влияния рефракции в земной атмосфере и возможности определения курсового угла светила. В одной из систем эта область ограничена в пределах высот светил от 33 до 80. При выборе пар светил для пеленгации учитывается взаимное расположение светил и Солнца. Углы между направлениями на звезды не должны быть менее 27, а между направлениями на звезду и Солнце менее 52. Первое ограничение накладывается по условиям достижения необходимой точности определения координат ЛА, второе для исключения помех фотоприемнику астрокорректора от Солнца. Точность определения координат с астроинерциальной системой может быть оценена по формуле где σ Δh* СКО суммарной ошибки определения высоты звезд; R радиус Земли; ΔА разность азимутов пеленгуемых звезд. Величина σ Δh* в основном зависит от точности определения вертикали, рефракции астролюка и атмосферы, инструментальной ошибки пеленгации. Поэтому для современных АИС на высотах полета от 200 до м в различных режимах работы среднее квадратическое радиальное отклонение ошибки определения координат может составить от 6 до 13 км. Ошибки в определении курса зависят от точности определения координат, широты места, инструментальных ошибок пеленгации, высоты звезд. При высоте звезд в пределах ошибки в определении курса в различных режимах работы АИС могут составлять 4-33". В зависимости от режима счисления, точности начальной выставки гироплатформы АИС и точности последней коррекции координат места ЛА современные АИС позволяют выполнять полет с обеспечением выполнения последующей астрокоррекции с вероятностью не менее 0,95 в течение 1,5-2 ч. Наибольшая продолжительность полета без коррекции возможна при выставке гироплатформы в азимуте с помощью оптического пеленгатора (σψ = 3-5") и полете в инерциально-доплеровском режиме счисления. 20
21 Глава III. ОЦЕНКА ТОЧНОСТИ ВОЗДУШНОЙ НАВИГАЦИИ СПОСОБЫ И ОЦЕНКА ТОЧНОСТИ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ЛА 3.1. Определение координат местоположения ЛА с требуемой точностью осуществляется для управления его движением по заданной траектории полета. Местоположение ЛА может быть определено следующими способами: моделирующим; обзорно-сравнительным; параметрическим В моделирующих способах определение координат места ЛА осуществляется путем счисления пути. Сущность счисления пути это решение в реальном масштабе времени уравнений движения центра масс ЛА и вычисление его текущих координат в выбранной системе отсчета. Способ требует знания начального положения ЛА, скорости и направления движения. В ортодромической системе, где координаты выражаются в линейной мере, кинематические уравнения движения могут быть представлены в виде где x о, y о ортодромические координаты начальной точки счисления пути; W (V) путевая (воздушная) скорость полета; β ортодромический путевой угол; R радиус сферы, заменяющей эллипсоид вращения. В зависимости от способа получения путевой скорости счисление пути может быть: инерциальным; доплеровским; воздушным; комбинированным (воздушно-доплеровским, инерциально-доплеровским). При инерциальном счислении используются составляющие путевой скорости, получаемые в ИНС, при доплеровском счислении составляющие путевой скорости, получаемые с помощью ДИСС. При воздушном счислении пути определение координат ЛА осуществляется по путевой скорости, получаемой по вектору воздушной скорости и вектору ветра, измеряемому каким-либо способом, или только по вектору воздушной скорости. Получение путевой скорости комбинированным способом осуществляется совместной обработкой сигналов, поступающих от ИНС и ДИСС (инерциально-доплеровское счисление). Моделирующие способы определения координат места ЛА являются автономными способами и обладают полной помехозащищенностью. Основной их недостаток заключается в возрастании со временем ошибок определения координат местоположения ЛА Точность определения координат места ЛА моделирующими способами характеризуется средним квадратическим радиальным отклонением, величина которого определяется по формуле 21
22 где σ ro средняя квадратическая радиальная ошибка знания начальных координат места ЛА; S пройденное расстояние; К сч коэффициент точности счисления. Коэффициент точности счисления характеризует возможности способа счисления по точности определения текущих координат места ЛА. Величина его зависит от точности определения ряда навигационных параметров и для инерциально-доплеровского, доплеровского счисления определяется соотношением где σ ψ средняя квадратическая ошибка измерения курса; σ α средняя квадратическая ошибка измерения угла сноса; σw/w средняя квадратическая относительная ошибка измерения путевой скорости; σ ωc среднее квадратическое значение угловой скорости собственного ухода курсового гироскопа; t время счисления пути; σ ин средняя квадратическая инструментальная ошибка счисления. Значения средних квадратических ошибок, характеризующих точность измерения навигационных параметров и возможности навигационных устройств, приводятся в соответствующих технических описаниях ПНС. Для воздушного счисления пути К сч рассчитывается по формуле где σv/v средняя квадратическая относительная ошибка измерения воздушной скорости; σ u средняя квадратическая ошибка измерения скорости ветра; σ δ0 средняя квадратическая ошибка измерения направления ветра. Коэффициент точности счисления для: инерциального, инерциально-доплеровского счисления составляет 0,002-0,005; доплеровского 0,02-0,03; воздушного 0,07-0, Обзорно-сравнительный способ определения координат ЛА основан на сравнении характеристик местности, хранящихся в запоминающих устройствах, с соответствующими фактическими характеристиками местности, над которой пролетает ЛА. К обзорносравнительным способам относятся визуальная ориентировка, ориентировка по изображению местности на экранах РЛС и других визиров. Обзорно-сравнительный способ реализуется в корреляционно-экстремальных навигационных системах (КЭНС), использующих информацию от геофизических полей (магнитного, гравитационного, рельефа местности, полей ориентиров и т. д.). Обзорно-сравнительные способы определения координат места ЛА автономны, обладают высокой помехозащищенностью, надежностью, а в КЭНС и высокой точностью К обзорно-сравнительным способам относятся следующие способы определения местоположения ЛА: визуальная ориентировка; с помощью бортовой РЛС; с помощью оптических, оптико-электронных визиров; 22
МИНИСТЕРСТВО ОБОРОНЫ РОССИЙСКОЙ ФЕДЕРАЦИИ ВОЕННО- ВОЗДУШНЫЕ СИЛЫ Р УКОВОДСТВО ПО ВОЗДУШНОЙ НАВИГАЦИИ АВИАЦИИ В ООРУЖЕННЫХ СИЛ РОССИЙСКОЙ ФЕДЕРАЦИИ Введено в действие приказом главнокомандующего ВВС от
Г О С У Д А Р С Т В Е Н Н Ы Й С Т А Н Д А Р Т С О Ю З А С С Р ОБОРУДОВАНИЕ САМОЛЕТОВ И ВЕРТОЛЕТОВ ПИЛОТАЖНО-НАВИГАЦИОННОЕ БОРТОВОЕ ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ ГОСТ 22837 77 Издание официальное ГОСУДАРСТВЕННЫЙ
Г о с у д а р с т в е н н ы й с т а н д а р т СОЮЗА ССР ОБОРУДОВАНИЕ САМОЛЕТОВ И ВЕРТОЛЕТОВ ПИЛОТАЖНО-НАВИГАЦИОННОЕ БОРТОВОЕ ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ ГОСТ 22837-77 Издание официальное украшения из кружева
ВЫПОЛНЕНИЕ ПОЛЕТА ПО МАРШРУТУ Способы выхода на исходный пункт маршрута ИПМ Выход на ИПМ по земным ориентирам применяют при наличии хорошо опознаваемых ориентиров, имеющихся на линии заданного пути от
МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ (МИНТРАНС РОССИИ) ФЕДЕРАЛЬНОЕ АГЕНТСТВО ВОЗДУШНОГО ТРАНСПОРТА (РОСАВИАЦИЯ) ФГБОУ ВПО «САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ГРАЖДАНСКОЙ АВИАЦИИ» ФОНД
Национальный технический университет Украины «Киевский политехнический институт» Кафедра приборов и систем ориентации и навигации Методические указания к лабораторным работам по дисциплине «Навигационные
Национальный технический университет Украины «Киевский политехнический институт» Кафедра приборов и систем ориентации и навигации Методические указания к лабораторным работам по дисциплине «Навигационные
Министерство образования и науки Российской Федерации Федеральное государственное автономное образовательное учреждение высшего профессионального образования Уральский федеральный университет имени первого
Национальный технический университет Украины «Киевский политехнический институт» Кафедра приборов и систем ориентации и навигации Методические указания к лабораторным работам по дисциплине «Навигационные
Национальный технический университет Украины «Киевский политехнический институт» Кафедра приборов и систем ориентации и навигации Методические указания к лабораторным работам по дисциплине «Навигационные
Министерство транспорта Российской Федерации (Минтранс России) Федеральное агентство воздушного транспорта (Росавиация) ФГОУ ВПО Санкт-Петербургский государственный университет гражданской авиации И.И.
Министерство транспорта Российской Федерации (Минтранс России) Федеральное агентство воздушного транспорта (Росавиация) ФГБОУ ВПО «Санкт-Петербургский государственный университет гражданской авиации» АЭРОНАВИГАЦИЯ
Министерство транспорта Российской Федерации (Минтранс России) Федеральное агентство воздушного транспорта (Росавиация) ФГБОУ ВПО Санкт-Петербургский государственный университет гражданской авиации АЭРОНАВИГАЦИЯ
Московский государственный технический университет имени Н.Э. Баумана А.В. Пролетарский, К.А. Неусыпин, И.А. Кузнецов Алгоритмы коррекции навигационных систем Допущено Учебно-методическим объединением
Создание БИНС-СП-2М Коллективом Московского института электромеханики и автоматики разработана бесплатформенная инерциальная навигационная система на лазерных гироскопах (ЛГ) и кварцевых акселерометрах
1 Министерство транспорта Российской Федерации (Минтранс России) Федеральное агентство воздушного транспорта (Росавиация) ФГБОУ ВПО Санкт-Петербургский государственный университет гражданской авиации ОСНОВЫ
ВЛИЯНИЕ ВЕТРА НА ПОЛЕТ САМОЛЕТА Навигационный треугольник скоростей и его элементы Рис. 1. Навигационный треугольник скоростей Треугольник, образованный вектором воздушной скорости, вектором ветра и вектором
Создание новейшей навигационной системы БИНС для самолетов Су-35, Су-35С, МиГ-35 Коллективом Московского института электромеханики и автоматики разработана бесплатформенная инерциальная навигационная система
АВТОНОМНАЯ СИСТЕМА НАВИГАЦИИ И ПОСАДКИ ДИРЕКТОРНОЕ УПРАВЛЕНИЕ САМОЛЕТОМ, ВЕРТОЛЕТОМ Индивидуальный тренажер летчика 78 333,5 СОСТАВ И НАЗНАЧЕНИЕ НАЗНАЧЕНИЕ «СДУ» предназначена для формирования командных
10. ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ ПУТЕВОЙ СКОРОСТИ И УГЛА СНОСА ДИСС-15 10.1. НАЗНАЧЕНИЕ ДИСС-15 предназначен для автоматического непрерывного измерения и индикации путевой скорости и угла сноса, составляющих
О Б Р О Б К А І Н Ф О Р М А Ц І Ї В СК ЛА ДНИ Х ТЕХНІЧНИ Х С ИСТЕМ АХ УДК 629.7 ПРИМЕНЕНИЕ КОМПЬЮТЕРА ДЛЯ ШТУРМАНСКИХ РАСЧЕТОВ НА ЭТАПЕ ПРЕДВАРИТЕЛЬНОЙ ПОДГОТОВКИ К ПОЛЕТУ В.В. Афанасьев (Харьковский университет
Оглавление Введение Глава I. Навигационные элементы 1.1. Краткие сведения о Земле 1.2. Навигационные системы координат 1.3. Системы координат, связанные с летательным аппаратом 1.4. Техническая реализация
УДК 62.396.26 Л.А. Подколзина, К.. Другов АЛГОРИТЫ ОБРАБОТКИ ИНФОРАЦИИ В НАВИГАЦИОННЫХ СИСТЕАХ НАЗЕНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ ДЛЯ КАНАЛА ОПРЕДЕЛЕНИЯ КООРДИНАТ ЕСТОПОЛОЖЕНИЯ Для определения координат и параметров
МИНИСТЕРСТВО ОБОРОНЫ РОССИЙСКОЙ ФЕДЕРАЦИИ Ставропольское высшее военное авиационное инженерное училище (военный институт) имени маршала авиации В.А. Судца А.В. Баженов, Г.И. Захаренко, А.Н. Бережнов, К.Ю.
1. ОБЩИЕ ТЕОРЕТИЧЕСКИЕ ПОЛОЖЕНИЯ 1.1. Понятие о земном эллипсоиде и сфере ТЕЗИСЫ ЛЕКЦИЙ Физическая поверхность Земли имеет сложную форму, которая не может быть описана замкнутыми формулами. В силу этого
Национальный технический университет Украины «Киевский политехнический институт» Кафедра приборов и систем ориентации и навигации Методические указания к лабораторным работам по дисциплине «Навигационные
3 ВВЕДЕНИЕ Настоящее пособие по изучению дисциплины «Авиационные информационно-измерительные системы» содержит перечень целей и задач дисциплины, последовательность изучения материала, перечень лабораторных
В.Д. Суслов, Д.В. Козис УДК 621.396.988.6: 629.19 МОДЕЛИРОВАНИЕ ТРАЕКТОРИИ ПОЛЕТА В НАВИГАЦИОННЫХ КОМПЛЕКСАХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ В.Д. Суслов, Д.В. Козис Рассматривается подход
Электронный журнал «Труды МАИ». Выпуск 54 www.mai.ru/science/trudy/ УДК 629.7.054.07 Сильносвязанная многоантенная интегрированная инерциальноспутниковая навигационная система Б. С. Алешин,Д.А. Антонов,
Национальный технический университет Украины «Киевский политехнический институт» Кафедра приборов и систем ориентации и навигации Методические указания к лабораторным работам по дисциплине «Навигационные
Инерциальные навигационные системы Лабораторная работа 1 Выставка платформенной ИНС. Необходимым и важным этапом подготовки ИНС к основному режиму функционирования «Навигация» - является режим «Выставка».
МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ УЛЬЯНОВСКОЕ ВЫСШЕЕ АВИАЦИОННОЕ УЧИЛИЩЕ ГРАЖДАНСКОЙ АВИАЦИИ (ИНСТИТУТ)
УДК 629.05 Решение задачи навигации с помощью бесплатформенной инерциальной системы навигации и системы воздушных сигналов Мкртчян В.И., студент, кафедра «Приборы и системы ориентации, стабилизации и навигации»
10 В. А. Добриков, В. А. Авдеев, Д. А. Гаврилов УДК 621.396.96+629.78 В. А. ДОБРИКОВ, В. А. АВДЕЕВ, Д. А. ГАВРИЛОВ ОПРЕДЕЛЕНИЕ ТРАЕКТОРИИ АВИАЦИОННОГО НОСИТЕЛЯ РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ
Отчѐт группы «Астрономия» по выполненной работе в ЭЭРЛ-2010 Поставленные цели Определение координат места наблюдения (географические широта и долгота); Определение магнитного склонения местности; Наблюдение
Программа летной подготовки пилотов-любителей Упр. (услов. обоз-я) Содержание упражнения Задача 1 Полеты по кругу и в зону Колво поле тов на 1 полет Контрольные Кол-во полетов час.мин Самостоятельные Кол-во
MIL AIP КНИГА I GEN 3.2.-1 BELARUS 15 июля 2015г. MIL GEN 3.2. АЭРОНАВИГАЦИОННЫЕ КАРТЫ 1. Ответственная служба Центральный орган аэронавигационной информации государственной авиации (ЦОАНИ) издает аэронавигационные
Приложение 1 ФЕДЕРАЛЬНОЕ АГЕНТСТВО ВОЗДУШНОГО ТРАНСПОРТА ФГОУ ВПО «АКАДЕМИЯ ГРАЖДАНСКОЙ АВИАЦИИ» УТВЕРЖДАЮ РЕКТОР АКАДЕМИИ ГА М.Ю.Смуров 2005 г. П Р О Г Р А М М А итогового междисциплинарного государственного
ВСЕРОССИЙСКАЯ ОЛИМПИАДА ШКОЛЬНИКОВ «ШАГ В БУДУЩЕЕ» «ШАГ В БУДУЩЕЕ, МОСКВА» ИНФРОМАТИКА И СИСТЕМЫ УПРАВЛЕНИЯ Оглавление Введение Измерение высоты Барометрический высотомер Радиотехнический высотомер Выбор
ТЕМА 1. Основы построения ЗРС. ЗАНЯТИЕ 3. Системы координат, используемые в ЗРС. Учебные вопросы 1. Необходимость применения различных систем координат в одной ЗРС. 2. Назначение, области применения и
ЗАДАНИЕ «ОПРЕДЕЛЕНИЕ КООРДИНАТ ТОЧЕК И ОРИЕНТИРУЮЩИХ УГЛОВ ПО ТОПОГРАФИЧЕСКОЙ КАРТЕ». Задачи: познакомиться с элементами топографической карты, ее математической основой, системами координат, картографической
ГОСТ 23634-83 (СТ СЭВ 3849-83) Морская навигация и морская гидрография. Термины и определения Постановлением Государственного комитета СССР по стандартам от 20 декабря 1983 г. 6391 срок введения установлен
Электронный журнал «Труды МАИ». Выпуск 38 www.mai.u/science/tudy/ УДК 681.586.325 Комплексная навигационная система летательного аппарата А.Ю. Мишин, О.А. Фролова, Ю.К. Исаев, А.В. Егоров Аннотация Объектом
Национальный техниеский университет Украины «Киевский политехниеский институт» Кафедра приборов и систем ориентации и навигации Методиеские указания к лабораторным работам по дисциплине «Навигационные
ООО «ТеКнол» 117246, Москва, Научный проезд, д. 20, стр.2 e-mail: [email protected] http://www.teknol.ru Инерциальная навигационная система «БИНС-ТЭК-С2» для авиационного применения Техническое описание
УДК 621.391.26 К.М. Другов, Л.А. Подколзина СИСТЕМЫ НАВИГАЦИИ НАЗЕМНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ Современный технический прогресс в области информационных технологий существенно расширяет тактико-технические
Ориентирование линий. Прямая и обратная геодезические задачи на плоскости. Ориентировать линию на местности значит определить ее положение относительно другого направления, принятого за исходное. В качестве
КРАТКИЕ СВЕДЕНИЯ ПО КАРТОГРАФИИ Форма и размеры земли. Системы координат на земной поверхности Физическая поверхность Земли, имеющая сложную геометрическую форму, близка к геоиду. Геоидом называется фигура,
М. И. Лебедев САМОЛЕТОВОЖДЕНИЕ Учебное пособие для летчиков и штурманов гражданской, военно- транспортной и стратегической авиации Часть I Ставрополь 2003г 1 2 Содержание. Раздел 1 Основы авиационной картографии.
Труды МАИ Выпуск 84 УДК 57:5198 wwwmairu/science/trudy/ Определение погрешностей бескарданной инерциальной навигационной системы в режиме рулежки и разгона Вавилова НБ* Голован АА Кальченко АО** Московский
Контрольная работа 1 «Масштаб + Работа с топокартой» 1. Что такое масштаб? 2. Перечислить виды масштабов. 3. Что такое точность и предельная точность масштаба? 4. Дано: на местности длина линии 250 м.
Навигация при полёте по кругу по правилам приборных полётов Перечень сокращений АРК (ADF) - автоматический радиокомпас БПРМ (NDB) - ближний приводной радиомаяк ДПРМ (NDB) - дальний приводной радиомаяк
МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ (МИНТРАНС РОССИИ) ФЕДЕРАЛЬНОЕ АГЕНТСТВО ВОЗДУШНОГО ТРАНСПОРТА (РОСАВИАЦИЯ) ФГБОУ ВПО «САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ГРАЖДАНСКОЙ АВИАЦИИ» КАФЕДРА
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ВОЗДУШНОГО ТРАНСПОРТА ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ГРАЖДАНСКОЙ АВИАЦИИ
Казалось бы, быстрее и удобнее всего лететь по прямой между двумя аэропортами. Однако на самом деле по кратчайшему пути летают только птицы, а самолеты - по воздушным трассам. Воздушные трассы состоят из отрезков между путевыми точками, а сами путевые точки - это условные географические координаты, имеющие, как правило, определенное легко запоминаемое название из пяти букв, похожее на слово (обычно латиницей, но в русскоязычных используется транслитерация). Обычно это «слово» ничего не обозначает, например, NOLLA или LUNOK, но иногда в нем угадывается название близлежащего населенного пункта или какого-то географического объекта, например, точка OLOBA расположена недалеко от города Олонец, а NURMA - это окрестности деревни Нурма.
Карта воздушных трасс
Маршрут строится из отрезков между точками для упорядочивания воздушного движения: если бы все летали произвольно, это сильно бы осложнило работу диспетчеров, поскольку было бы очень сложно предугадать, где и когда окажется каждый из летящих самолетов. А тут все раз - и летят друг за другом. Удобно! Диспетчеры следят, чтобы самолеты летели на расстоянии не более 5 километров друг от друга, и если кто-то кого-то нагоняет, его могут попросить лететь чуть медленнее (или второго - чуть быстрее).
В чем секрет дуги?
Почему же тогда летают по дуге? На самом деле это иллюзия. Маршрут даже по трассам довольно близок к прямому, а дугу вы видите только на плоской карте, потому что Земля-то круглая. Проще всего убедиться в этом, взяв глобус и натянув прямо по его поверхности нитку между двумя городами. Запомните, где она пролегает, а теперь попробуйте повторить ее маршрут на плоской карте.
Маршрут полета из Москвы в Лос-Анджелес только кажется дугой
Есть, правда, еще один нюанс, касающийся трансконтинентальных перелетов. Четырехдвигательные самолеты (Boieng-747, Airbus A340, A380) могут летать по прямой. А вот более экономичным двухдвигательным (Boeing-767, 777, Airbus A330 и пр.) приходится делать крюк из-за сертификаций ETOPS (Extended range twin engine operational performance standards). Они должны держаться на расстоянии не далее определенного времени полета до ближайшего запасного аэродрома (как правило, 180 минут, но бывает и больше - 240 или даже 350), и в случае отказа одного двигателя сразу же отправляться туда для аварийной посадки. Получается действительно полет по дуге.
Чтобы увеличить «пропускную способность» трассы, используют эшелонирование, то есть, разводят самолеты по высоте. Конкретная высота полета и называется эшелоном, или, по-английски, Flight Level - «уровень полета». Сами эшелоны так и называются - FL330, FL260 и т.п., число обозначает высоту в сотнях футов. То есть, FL330 - это высота в 10058 метров. В России до недавного времени использовали метрическую систему, поэтому пилоты до сих пор по привычке говорят: «Наш полет пройдет на высоте десять тысяч метров», но сейчас тоже перешли на международную футовую.
Навигационный дисплей
Как набирают высоту?
«Четные» эшелоны (300, 320, 340 и т.п.) используются при полетах с востока на запад, нечетные - с запада на восток. В некоторых странах эшелоны делятся между четырьмя сторонами света. Смысл прост: благодаря этому между самолетами, летящими навстречу друг другу, всегда будет как минимум 1000 футов по высоте, то есть, более 300 метров.
А вот разница во времени полета с востока на запад и с запада на восток не имеет к эшелонам никакого отношения. И к вращению Земли тоже, потому что атмосфера вращается вместе с планетой. Все просто: в Северном полушарии ветры дуют чаще с запада на восток, поэтому в одном случае скорость ветра прибавляется к скорости самолета относительно воздуха (она условно постоянна), а в другом - вычитается из него, поэтому скорость относительно земли разная. А на эшелоне ветер может дуть со скоростью и 100, и 150, и даже 200 км/ч.
Направление движения самолетов на эшелонах
Как работает навигация?
Еще совсем недавно летчики умели ориентироваться в том числе по Солнцу, Луне и звездам, и на старых самолетах для этого даже были окошки в верхней части кабины. Процесс был довольно сложным, поэтому в экипажах присутствовал еще и штурман.
В аэронавигации используются наземные радиомаяки - радиостанции, посылающие в эфир сигнал на известной частоте из известной точки. Частоты и точки обозначены на картах. Настроив бортовой приемник со специальной «круговой» антенной на нужную частоту, можно понимать, в каком направлении от вас находится радиомаяк.
Если маяк самый простой, ненаправленный (NDB, non-directional beacon), то больше узнать ничего нельзя, но по изменению направления на этот маяк при известной скорости можно вычислить свои координаты. Более продвинутый азимутальный маяк (VOR, VHF Omni-directional Radio Range) тоже имеет круговые антенны и поэтому с его помощью можно определить магнитный пеленг, то есть, понять, каким курсом вы относительно этого маяка двигаетесь. Дальномерный маяк (DME, Distance Measuring Equipment, не путать с аэропортом Домодедово), работающий по принципу радара, позволяет определить расстояние до него. Как правило, азимутальные и дальномерные маяки (VOR/DME) устанавливаются в паре.
Именно так выглядит Лондон и его окрестности в приложении Flight Radar 24
Лекция №1. Основные навигационные понятия и определения……………….2
Лекция №2. Сведения о форме и размерах Земли………………………………7
Лекция №3. Определение относительных координат ВС……………………...16
Лекция №4. Штурманская подготовка к полету………………………………..22
Лекция №5. Общие правила воздушной навигации……………………………25
Лекция №6. Обеспечение безопасности полетов в навигационном отношении. Требования к содержанию навигационного обеспечения
полетов……………………………………………………………..29
Лекция №7. Применение курсовых систем…………………………………….37
Лекция №8. Визуальная ориентировка…………………………………………41
Лекция №9. Применение доплеровского измерителя путевой скорости и угла сноса. Навигационные характеристики ДИСС, принцип измерения путевой скорости, угла сноса с помощью ДИСС. Курсо- доплеровское измерение координат ВС, курсо - доплеровский навигационный комплекс…………………………………………47
Лекция №10. Неавтономные системы навигации………………………………51
Лекция №11. Дальномерные радионавигационные системы…………………..59
Лекция №12. Применение угломерно-дальномерных навигационных систем65
Лекция №13. Применение радиолокационной станции в полёте……………..69
Лекция №14. Спутниковые системы радионавигации………………………….75
Список использованной литературы……………………………………………..79
Лекция №1. Основные навигационные понятия и определения
«Воздушная навигация» - наука о вождении воздушных судов по программной траектории.
Полет является сложным движением самолета в воздухе. Его можно разложить на поступательное движение центра масс и угловое движение вокруг центра масс. При описании положения самолета в процессе его поступательного движения используется ряд точек и линий. Они служат основой для ведения навигационных понятий, непосредственно связанных с движением центра масс самолета. К ним относятся: пространственное место самолета (ПМС),место самолета (МС),траектория полета (ТП),линия пути (ЛП).
Пространственное место самолета - точка пространства, в которой в данный момент находится центр масс самолета.
Место самолета – точка на земной поверхности, в которую в данный момент проектируется центр масс самолета. Пространственное место самолета и место самолета могут быть заданными и фактическими.
Траектория полета - пространственная линия, описываемая центром масс самолета при движении. Она может быть заданной, требуемой и фактической. Под пространственно - временной траекторией полета понимают траекторию полета, заданную не только в пространстве, но и во времени. Заданная пространственно- временная траектория называется программной.
Линия пути - это проекция траектории полета самолета на поверхность Земли. Проекция программной траектории полета на поверхность Земли называется линией заданного пути (ЛЗП). Линия, по которой должен пролететь самолет, называется маршрутом полета.
Профилем полета – называется проекция программной траектории на вертикальную плоскость, проведенную через развернутый маршрут полета в прямую линию. Проекция на земную поверхность фактической траектории полета самолета называется линией фактического пути (ЛФП). Вдоль маршрутов устанавливаются ВТ и МВП, представляющие собой ограниченные по высоте и ширине коридоры в воздушном пространстве.
ВТ - коридор в воздушном пространстве, ограниченный по высоте и ширине, предназначенный для выполнения полетов воздушными судами всех ведомств, обеспеченный трассовыми аэродромами и оборудованный средствами радионавигации, контроля и управления воздушным движением.
МВП - коридор в воздушном пространстве, ограниченный по высоте и ширине и предназначенный для выполнения полетов воздушными судами при осуществлении местных воздушных сообщений.
При решении ряда навигационных задач могут применяться несколько координатных систем. В общем случае их выбор и применение зависят от характера технических средств навигации и возможностей вычислительных устройств. Положение МПС и МС в любой системе определяется координатами, которые определяются линейными или угловыми величинами. В навигации к наиболее употребительным геоцентрическим системам относятся: географическая (астрономическая и геодезическая),нормальная сферическая ,ортодромическая иэкваториальная .
В качестве основных географических систем используются: прямоугольные правые системы координат (нормальная земная и стартовая),биполярные (плоская и сферическая),гиперболическая игоризонтальная .
При проектировании физической поверхности Земли на поверхность геоида используется астрономическая система координат. Координатами место самолета в этой системе являются:
астрономическая широта а - угол между плоскостью экватора и направлением отверстий линий в данной точке, измеряющийся в плоскости экватора к полюсам от 0 о до90 о;
астрономическая долгота а - двугранный угол, заключенный между плоскостью Гринвичского меридиана и плоскостью, проходящей через отвесную линию в данной точке параллельно оси вращения Земли (плоскостью астрономического меридиана) измеряющийся от 0 о до180 о к востоку и западу.
Координатами в геодезической системе (рис. 1.2) являются:
геодезическая широта В – угол между плоскостью экватора 1 и нормальную4 к референц - эллипсоиду в данной точке М (измеряется от плоскости экватора к полюсам от 0 о до90 о);
геодезическая долгота L– двугранный угол между плоскостями Гринвичского и геодезического5 меридианов данной точки М (измеряется от 0 о до180 о к востоку и западу, в некоторых случаях от 0 о до 360 о к востоку).
Географическая система координат:
географическая широта г - двугранный угол, заключенный между плоскостью экватора и нормалью (отвесной линией) к поверхности эллипсоида (геоида) в данной точке М (измеряется от экватора к полюсам от 0 о до90 о);
географическая долгота г – двугранный угол, заключенный между плоскостями начального (гринвичского) меридиана и меридиана данной точки М. Измеряется от 0 о до180 о к востоку и западу (при решении некоторых задач от 0 о до 360 о к востоку).
Нормальная система координат:
нормальная сферическая широта - угол между плоскостью экватора и направлением из центра земного шара в точку, являющуюся изображением соответствующей точки эллипсоида. Измеряется центральным углом или дугой меридиана в тех же пределах. Что и географическая широта;
нормальная сферическая долгота - двугранный угол между плоскостью начального (гринвичского меридиана) и плоскостью меридиана данной точки. Измеряется либо центральным углом в плоскости экватора либо дугой экватора от начального меридиана до меридиана данной точки в тех же пределах, что и географическая долгота.
Физическое состояние воздушной среды, а также направление ее перемещения относительно земной поверхности оказывают существенное влияние на траекторию движения самолета в любой системе координат. Для оценки движения самолета по траектории используются геометрические и механические величины, характеризующие пространственное положение самолета, скорость и направление его движения в некоторый момент времени. Их принято называть навигационными элементами полета и подразделять на навигационные элементы и движения.
Высота полета - это расстояние по вертикали от некоторого уровня, принятого от начала отсчета, до самолета.
Элементами второй группы являются: путевая скорость, путевой угол, угол сноса, воздушная скорость, курс и вертикальная скорость.
Скорость полета самолета определяют как относительно воздушной среды, окружающий самолет, так и относительно земной поверхности.
Курсом
самолета
γ – называется угол в
горизонтальной плоскости м ежду
направлением, принятым за начало отсчета1
в точке местоположения самолета,
и проекцией на эту плоскость его
продольной оси2
(рис. 1.7).
ежду
направлением, принятым за начало отсчета1
в точке местоположения самолета,
и проекцией на эту плоскость его
продольной оси2
(рис. 1.7).
Путевой скоростью полета называется скорость перемещения по земной поверхности МС, направленная по касательной к линии пути2 .
Путевым углом называется угол между направлением, принятым за начало отсчета и линией пути (вектором путевой скоростиW). Он также как и курс отчитывается от начала отсчета по часовой стрелке от 0 о до 360 о.
Угол сноса - самолета называется угол между вектором воздушной скорости и вектором путевой скорости в горизонтальной плоскости. Он считается положительным, если вектор путевой скорости расположен правее вектора воздушной скорости, отрицательным – если левее.
Вертикальной скоростью W в называется вертикальная составляющая вектора полной скорости поступательного перемещения самолета относительно ЗемлиW(рис. 1.7) .
Рассмотренные выше навигационные элементы полета могут быть заданными, фактическими и требуемыми. Например, линии фактического пути - фактический путевой угол, линии заданного пути - заданный путевой угол, а линии требуемого пути - требуемый путевой угол.
Постановка навигационной задачи основывается на определении программных, фактических и требуемых значений навигационно- пилотажных параметров относительно воздушной среды и земной поверхности, характеризующих соответствующие траектории полета.
Полету любого назначения предшествует расчет программной траектории и составление (разработка) заданной навигационной программы полета, рассчитанная программная траектория, обеспечивающая наиболее безопасный и экономический полет, может быть задана аналитически или графически в различных системах координат. Аналитически она выражается конечными уравнениями движения центра масс самолета, которые в широко распространенной ортодромической прямоугольной системе координат имеют вид:
 (1.9)
(1.9)
где Z з,S з,H з – заданные (программные) ортодромические прямоугольные координаты ПМС в заданный момент времени Т.
Для указания программной траектории полета экипажу задаются маршрут полета, время полета его опорных пунктов, а также профиль полета. Навигационная программа, разработанная на основе программной траектории, в зависимости от возможностей технических средств навигации и пилотирования может вводиться в запоминающие устройства навигационных вычислителей и представляться на индикаторах навигационной обстановки, автоматических картографических планшетах, полетных картах, бортовых журналах и планах полета. Полет по программной траектории согласно навигационной программе должен выполняться в соответствии с руководством по летной эксплуатации. В них регламентируются правила, условия и ограничения по летной эксплуатации и пилотированию самолета данного типа.
Характер траектории определяется режимами полета самолета. Последние в свою очередь, характеризуются различными навигационными и пилотажными параметрами, под которыми понимают механические и геометрические величины и их производные, применяемые в самолетовождении.
Навигационные и пилотажные параметры могут совпадать с навигационными элементами полета или быть связаны с ними простыми соотношениями. К навигационным параметрам относятся: координаты пространственного места самолета, путевая скорость, путевой угол, угол сноса, вертикальная скорость, производные этих параметров и другие.
К пилотажным относятся: воздушная скорость, курс самолета, вертикальная скорость относительно воздушной среды, угловая скорость, углы рыскания, крена, тангажа и др. Согласно такому делению параметров, используемых в СВЖ, различают навигационный и пилотажный режимы полетов.